Estructura del circuito y principio del sensor de temperatura del dominio del tiempo
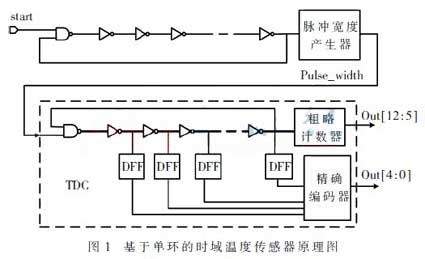
El sensor de temperatura del dominio del tiempo primero necesita convertir la información de temperatura en información del tiempo, y el oscilador en anillo es una forma de convertir la temperatura en una variable del dominio del tiempo. Según la literatura, el retraso del inversor tiene una relación lineal con la temperatura. La frecuencia finalmente se mide en una palabra de código digital midiendo la frecuencia con un convertidor de tiempo a digital (TDC). Para mejorar aún más la precisión, a menudo es necesario calibrar los datos convertidos. Además, la calibración de la tensión de alimentación también se puede lograr midiendo la varianza varias veces. La figura 1 muestra la estructura del circuito principal de un sensor de temperatura en el dominio del tiempo basado en un convertidor con compensación de temperatura.
1.1 Análisis y mejora del circuito de detección.
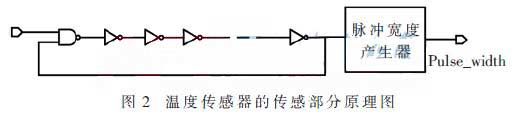
La parte de detección de este diseño utiliza principalmente la relación entre la temperatura y el retraso del inversor para convertir la temperatura en el ancho de pulso variable de tiempo ancho de pulso asociado con él. Su esquema esquemático se muestra en la Figura 2.
El retraso del inversor tiene la siguiente relación cuantitativa con la temperatura:

Donde W y L son el ancho y la longitud de los transistores constituyentes, respectivamente; CL y Cox son capacitancia de carga y capacitancia de capa de óxido por unidad de área; μ es la movilidad de los electrones (u huecos);
VDD y Vth son la tensión de alimentación y la tensión umbral, respectivamente. De la ecuación se puede ver que el retraso del inversor está relacionado con una pluralidad de parámetros en los que la movilidad μ y el voltaje umbral Vth dependen de la temperatura. El cambio en la relación de aspecto del transistor provoca cambios tanto en el voltaje umbral como en la capacitancia de carga, por lo que elegir el tamaño correcto del transistor es especialmente importante para la parte de detección.En comparación con la movilidad, la temperatura causa una relación pequeña y sustancialmente lineal con el retraso del inversor al afectar el voltaje de umbral. Por lo tanto, en el rango de medición de 50 ° C a 100 ° C de interés en este trabajo, solo se puede considerar la influencia de la temperatura en la movilidad.La movilidad tiene un coeficiente de temperatura negativo y su relación específica es la siguiente:

Las variables de dominio de tiempo con información de temperatura se pueden obtener utilizando el generador de ancho de pulso en la referencia. De acuerdo con las ecuaciones (1) y (2), el ancho pulse_width del pulso es una variable de tiempo relacionada con la temperatura. A partir del análisis cuantitativo del inversor y la temperatura en las ecuaciones (1) y (2), el ancho de pulso del pulso es lineal con la temperatura dentro del rango de temperatura medido. La relación no lineal entre la frecuencia de oscilación y la temperatura del oscilador compuesto por los inversores en serie es la causa principal del error de medición del sensor. Este diseño mejora este problema al aumentar el coeficiente de temperatura de la frecuencia del anillo oscilante.
1.2 Análisis y mejora del convertidor de tiempo a digital
El anillo oscilador de TDC es un punto clave de este diseño. Idealmente, el TDC debería ser completamente independiente de la temperatura para reducir el error de cuantificación. Sin embargo, el TDC [2], que consiste directamente en unidades de nivel de puerta estándar, tiene dos problemas: el primero es que la frecuencia del bucle de oscilación es muy alta y el otro es que la oscilación del TDC es sensible a la temperatura. La frecuencia de oscilación excesiva hace que el anillo de oscilación se autocaliente más alto, lo que afecta su propia precisión a través de los cambios de temperatura. Si el tamaño de la unidad de retardo de oscilación de TDC se cambia directamente para reducir la frecuencia del anillo de oscilación, el coeficiente de temperatura es demasiado grande para aumentar el error de cuantificación del TDC. Un TDC que consta directamente de unidades estándar y de compuerta, en el rango de alta temperatura de más de 50 ° C, puede causar un error excesivamente inaceptable debido a las razones anteriores. Por lo tanto, este TDC solo es adecuado para su uso en el rango de temperatura más bajo de 0 ° C ~ 60 ° C. Esta es la deficiencia de la mayoría de los documentos relacionados existentes. Cómo mejorar este defecto para hacerlo más adecuado para la medición de temperatura en el rango de 50 ~ 100 ° C es el objetivo principal de la mejora de este diseño.
El TDC en este diseño utiliza una estructura similar a la referencia, como se muestra en el cuadro discontinuo en la Figura 1 como un esquema del TDC. El contador grueso de 8 bits cuenta el oscilador [12: 5]. Cuando llega el límite descendente de pulse_width, el contador grueso deja de contar y el codificador de precisión rastrea la porción de menos de un período de conteo y se decodifica en una palabra de código de 5 bits. El resultado de la cuantización final es la combinación de la salida del contador grueso y el codificador exacto.
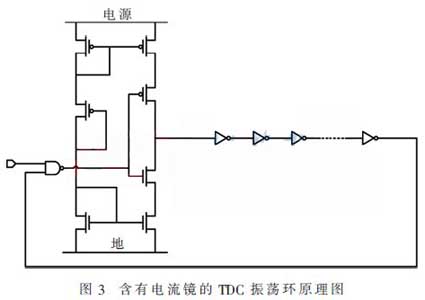
La idea básica de este artículo es utilizar la compensación de temperatura del espejo actual para construir el anillo de oscilación del TDC para eliminar la deriva de temperatura del TDC en el rango de temperatura monitoreado. El espejo de corriente funciona compensando la corriente de fuga para cambiar la carga y el tiempo de descarga del transistor, cambiando así el retraso de la unidad de retraso. El anillo de oscilación de TDC con espejo actual se muestra en la Figura 3. Los resultados de la simulación se muestran en la Figura 4. De los resultados de la simulación se puede ver que el retraso del espejo actual de este diseño tiene un coeficiente de temperatura negativo y el retraso del inversor tiene un coeficiente de temperatura positivo dentro del rango de medición. Los resultados de la simulación de Monte Carlo pueden distribuir razonablemente el número de unidades de retardo de espejo e inversores actuales, de modo que tengan una pequeña deriva de temperatura en el rango de temperatura monitoreado de 50 ° C ~ 100 ° C y el resultado ideal de una frecuencia de oscilación aceptable. Los resultados de la simulación muestran que el anillo oscilante de esta estructura puede ajustar el rango de temperatura de deriva de temperatura cerca de 0 para cumplir con los requisitos de la aplicación de acuerdo con la aplicación específica y cambiando el tamaño del inversor y la cantidad de espejos de corriente. Al mismo tiempo, la frecuencia de oscilación de la estructura se reduce significativamente en comparación con la frecuencia del anillo de oscilación compuesta por celdas estándar.
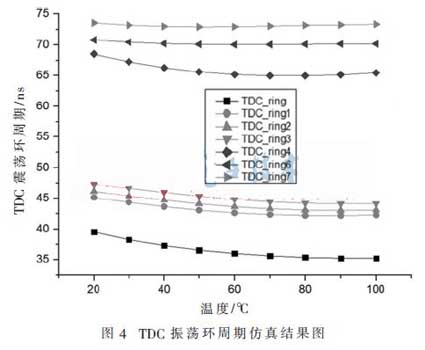
Como se muestra en la FIG. 4, TDC_ringx (x = 1, 2, 3 ...) representa el resultado de la simulación del ciclo del anillo de oscilación TDC bajo diferentes parámetros. Los resultados de la simulación muestran que al ajustar diferentes parámetros, la unidad de retardo con espejo actual puede compensar la deriva de temperatura de la cadena de retardo del inversor dentro de un cierto rango. En este diseño, se determina que este rango es de 50 ° C a 100 ° C.
Dado que la oscilación del oscilador generará un cierto grado de autocalentamiento, el autocalentamiento afecta, por un lado, a la precisión de la detección de temperatura. y, por otro lado, trae una influencia irreversible en el circuito, como acelerar el envejecimiento del circuito. Cuando la frecuencia de oscilación es demasiado alta, el autocalentamiento es particularmente grave. En base a estos problemas, el diseño está diseñado para dimensionar adecuadamente el inversor en el anillo oscilante TDC para reducir la frecuencia del anillo oscilante TDC, reduciendo así el autocalentamiento del circuito. Para resolver el problema de que el coeficiente de temperatura de TDC se hace grande debido al cambio en el tamaño del inversor. Se agrega un espejo de corriente para compensación de temperatura al anillo oscilante del TDC para que la deriva de temperatura del TDC sea cercana a cero dentro del rango de detección, permitiendo así que el sensor cumpla con los requisitos de la aplicación.
1.1 Análisis y mejora del circuito de detección.
La parte de detección de este diseño utiliza principalmente la relación entre la temperatura y el retraso del inversor para convertir la temperatura en el ancho de pulso variable de tiempo ancho de pulso asociado con él. Su esquema esquemático se muestra en la Figura 2.
El retraso del inversor tiene la siguiente relación cuantitativa con la temperatura:
Donde W y L son el ancho y la longitud de los transistores constituyentes, respectivamente; CL y Cox son capacitancia de carga y capacitancia de capa de óxido por unidad de área; μ es la movilidad de los electrones (u huecos);
VDD y Vth son la tensión de alimentación y la tensión umbral, respectivamente. De la ecuación se puede ver que el retraso del inversor está relacionado con una pluralidad de parámetros en los que la movilidad μ y el voltaje umbral Vth dependen de la temperatura. El cambio en la relación de aspecto del transistor provoca cambios tanto en el voltaje umbral como en la capacitancia de carga, por lo que elegir el tamaño correcto del transistor es especialmente importante para la parte de detección.En comparación con la movilidad, la temperatura causa una relación pequeña y sustancialmente lineal con el retraso del inversor al afectar el voltaje de umbral. Por lo tanto, en el rango de medición de 50 ° C a 100 ° C de interés en este trabajo, solo se puede considerar la influencia de la temperatura en la movilidad.La movilidad tiene un coeficiente de temperatura negativo y su relación específica es la siguiente:
Donde q es la carga del electrón (o agujero); m es la calidad efectiva; T es la temperatura; Ni es la concentración de impurezas de ionización; A y B son coeficientes relativos. Se puede saber por la ecuación (1) que el retraso del inversor es inversamente proporcional a la movilidad D∝1 / μ; De la fórmula (2) se puede ver que la movilidad es inversamente proporcional a la temperatura μ∝1 / T ^ a (donde a es una constante [4] cercana a 1). Se puede saber por la literatura que la frecuencia del oscilador del anillo es F = 1 / (2ND), por lo que la sensibilidad de la frecuencia del anillo de oscilación a la temperatura es inversamente proporcional a la relación de aspecto del transistor. La frecuencia de oscilación excesiva del anillo de oscilación conduce a un gran consumo de energía y provoca un gran efecto de autocalentamiento, lo que perturba la medición de la temperatura real. El método de simulación Monte Carlo se utiliza para obtener una relación razonable de ancho a longitud de PMOS de L / W = 0.3 μ / 0.24 μ, porque la movilidad de los electrones es aproximadamente 2.5 veces mayor que la de los agujeros. Para igualar el tiempo de subida y el tiempo de caída del inversor, la relación ancho / largo del NMOS es L / W = 0.3 μ / 0.12 μ. Teniendo en cuenta la frecuencia de oscilación y el coeficiente de temperatura, finalmente se selecciona el oscilador en anillo compuesto por el inversor de 31 etapas.
Las variables de dominio de tiempo con información de temperatura se pueden obtener utilizando el generador de ancho de pulso en la referencia. De acuerdo con las ecuaciones (1) y (2), el ancho pulse_width del pulso es una variable de tiempo relacionada con la temperatura. A partir del análisis cuantitativo del inversor y la temperatura en las ecuaciones (1) y (2), el ancho de pulso del pulso es lineal con la temperatura dentro del rango de temperatura medido. La relación no lineal entre la frecuencia de oscilación y la temperatura del oscilador compuesto por los inversores en serie es la causa principal del error de medición del sensor. Este diseño mejora este problema al aumentar el coeficiente de temperatura de la frecuencia del anillo oscilante.
1.2 Análisis y mejora del convertidor de tiempo a digital
El anillo oscilador de TDC es un punto clave de este diseño. Idealmente, el TDC debería ser completamente independiente de la temperatura para reducir el error de cuantificación. Sin embargo, el TDC [2], que consiste directamente en unidades de nivel de puerta estándar, tiene dos problemas: el primero es que la frecuencia del bucle de oscilación es muy alta y el otro es que la oscilación del TDC es sensible a la temperatura. La frecuencia de oscilación excesiva hace que el anillo de oscilación se autocaliente más alto, lo que afecta su propia precisión a través de los cambios de temperatura. Si el tamaño de la unidad de retardo de oscilación de TDC se cambia directamente para reducir la frecuencia del anillo de oscilación, el coeficiente de temperatura es demasiado grande para aumentar el error de cuantificación del TDC. Un TDC que consta directamente de unidades estándar y de compuerta, en el rango de alta temperatura de más de 50 ° C, puede causar un error excesivamente inaceptable debido a las razones anteriores. Por lo tanto, este TDC solo es adecuado para su uso en el rango de temperatura más bajo de 0 ° C ~ 60 ° C. Esta es la deficiencia de la mayoría de los documentos relacionados existentes. Cómo mejorar este defecto para hacerlo más adecuado para la medición de temperatura en el rango de 50 ~ 100 ° C es el objetivo principal de la mejora de este diseño.
Se explicó en la Sección 1.1 que la frecuencia de oscilación del anillo oscilante está relacionada con el número de etapas del inversor y el retraso de cada etapa del inversor. Cuando el número de etapas del inversor es menor, la frecuencia del anillo de oscilación es mayor. En este diseño, en consideración del problema de autocalentamiento del circuito, generalmente es deseable tener la frecuencia del anillo de oscilación lo más baja posible. Cuando las otras condiciones son constantes, la frecuencia del anillo de oscilación puede reducirse aumentando el número de etapas del inversor. Como el retardo de celda estándar es pequeño, se necesitan unos cientos de inversores para obtener la frecuencia de oscilación que el contador puede muestrear, lo que obviamente no es razonable. Otra forma de cambiar la frecuencia del oscilador es cambiar el retraso D del inversor. Como ya se mencionó, esto cambiará el coeficiente de temperatura del anillo oscilante, resultando en una deriva de temperatura. Por lo tanto, para reducir la deriva de temperatura, el diseño introduce una unidad de espejo de corriente capaz de cancelar el coeficiente de temperatura del inversor.
El TDC en este diseño utiliza una estructura similar a la referencia, como se muestra en el cuadro discontinuo en la Figura 1 como un esquema del TDC. El contador grueso de 8 bits cuenta el oscilador [12: 5]. Cuando llega el límite descendente de pulse_width, el contador grueso deja de contar y el codificador de precisión rastrea la porción de menos de un período de conteo y se decodifica en una palabra de código de 5 bits. El resultado de la cuantización final es la combinación de la salida del contador grueso y el codificador exacto.
La idea básica de este artículo es utilizar la compensación de temperatura del espejo actual para construir el anillo de oscilación del TDC para eliminar la deriva de temperatura del TDC en el rango de temperatura monitoreado. El espejo de corriente funciona compensando la corriente de fuga para cambiar la carga y el tiempo de descarga del transistor, cambiando así el retraso de la unidad de retraso. El anillo de oscilación de TDC con espejo actual se muestra en la Figura 3. Los resultados de la simulación se muestran en la Figura 4. De los resultados de la simulación se puede ver que el retraso del espejo actual de este diseño tiene un coeficiente de temperatura negativo y el retraso del inversor tiene un coeficiente de temperatura positivo dentro del rango de medición. Los resultados de la simulación de Monte Carlo pueden distribuir razonablemente el número de unidades de retardo de espejo e inversores actuales, de modo que tengan una pequeña deriva de temperatura en el rango de temperatura monitoreado de 50 ° C ~ 100 ° C y el resultado ideal de una frecuencia de oscilación aceptable. Los resultados de la simulación muestran que el anillo oscilante de esta estructura puede ajustar el rango de temperatura de deriva de temperatura cerca de 0 para cumplir con los requisitos de la aplicación de acuerdo con la aplicación específica y cambiando el tamaño del inversor y la cantidad de espejos de corriente. Al mismo tiempo, la frecuencia de oscilación de la estructura se reduce significativamente en comparación con la frecuencia del anillo de oscilación compuesta por celdas estándar.
Como se muestra en la FIG. 4, TDC_ringx (x = 1, 2, 3 ...) representa el resultado de la simulación del ciclo del anillo de oscilación TDC bajo diferentes parámetros. Los resultados de la simulación muestran que al ajustar diferentes parámetros, la unidad de retardo con espejo actual puede compensar la deriva de temperatura de la cadena de retardo del inversor dentro de un cierto rango. En este diseño, se determina que este rango es de 50 ° C a 100 ° C.
Dado que la oscilación del oscilador generará un cierto grado de autocalentamiento, el autocalentamiento afecta, por un lado, a la precisión de la detección de temperatura. y, por otro lado, trae una influencia irreversible en el circuito, como acelerar el envejecimiento del circuito. Cuando la frecuencia de oscilación es demasiado alta, el autocalentamiento es particularmente grave. En base a estos problemas, el diseño está diseñado para dimensionar adecuadamente el inversor en el anillo oscilante TDC para reducir la frecuencia del anillo oscilante TDC, reduciendo así el autocalentamiento del circuito. Para resolver el problema de que el coeficiente de temperatura de TDC se hace grande debido al cambio en el tamaño del inversor. Se agrega un espejo de corriente para compensación de temperatura al anillo oscilante del TDC para que la deriva de temperatura del TDC sea cercana a cero dentro del rango de detección, permitiendo así que el sensor cumpla con los requisitos de la aplicación.




