Design der Antenne im SAW-Temperatursensor-Temperatur messsystem
In vielen Stromversorgungsanlagen aufgrund des Installationsprozesses und der Alterung usw. Der Kontaktwiderstand der Stromleitungskontakte wird groß, was wiederum zu einem Temperaturanstieg führt, und in schweren Fällen werden die Kontakte durchgebrannt, was zu einem Stromausfall führt. Um dieses Sicherheitsrisiko zu vermeiden, ist es notwendig, eine Vorrichtung zur Temperaturüberwachung zu entwerfen und zu entwickeln.
Herkömmliche Temperatursensoren können in rauen Umgebungen wie Hochspannung und Hochstrom keine kontinuierliche Temperaturüberwachung durchführen, während Temperatursensoren für akustische Oberflächenwellen mit Antennensystemen kombiniert werden können, um eine drahtlose passive Erkennung zu erreichen und in den oben genannten rauen Umgebungen normal zu arbeiten. Lee Keekeun und FACHBERGER R et al. entwarf einen verzögerten linearen Oberflächen-Schallwellentemperatursensor. Eine Mittenfrequenz beträgt 440 MHz und die andere 2,4 GHz, die zur Temperaturerfassung in Hochtemperaturumgebungen verwendet werden kann, aber der maximale effektive Erfassungsabstand zwischen beiden ist nicht weit. Ling Mingfang und Zhu Yunhai entwarfen die Schaltung des Temperatursensors vom Typ eines akustischen Oberflächenwellenresonators. Die Testdaten zeigen: Der Temperatursensor für akustische Oberflächenwellenresonanz hat die Vorteile einer hohen Frequenzstabilität und einer guten Linearität und eignet sich zum Testen in hochpräzisen Temperaturanwendungen. Entsprechend dem Forschungsstatus im In- und Ausland kann der Resonanzoberflächen-Schallwellentemperatursensor zusammengefasst werden, der die Vorteile einer guten Zuverlässigkeit und einer hohen Empfindlichkeit aufweist. Im Vergleich zum Verzögerungsleitungstyp ist es besser für die drahtlose Erkennung geeignet.
Planare invertierte F-Antenne, dh PIFA-Antenne.
Es hat den Vorteil, dass es vom Metallkörper nicht beeinflusst wird, leicht zu integrieren ist und eine eigene Bezugsebene hat. Als Systemsendeantenne ist sie mit dem Lesegerät verbunden und für das Senden des Anregungssignals und das Empfangen des reflektierten Signals verantwortlich. Die Normalmodus-Spirale wird aufgrund ihrer geringen Größe und der omnidirektionalen Strahlungsstrahlung als Empfangsantenne des Systems verwendet. Es ist dafür verantwortlich, das Signal von der Sendeantenne zu empfangen und an den Oberflächenwellen-Temperaturfühler zu senden. Daher ist die Sendeantenne des Systems PIFA, und die Empfangsantenne ist eine Normalmodus-Wendelantenne.
1 System Gesamtdesign
Der SAW-Temperatursensor (Surface Acoustic Wave) verwendet die Technologie der akustischen Oberflächenwellen. Im Vergleich zu herkömmlichen Sensoren bietet es die Vorteile einer hohen Präzision, einer hohen Empfindlichkeit, einer einfachen Integration und eines geringen Stromverbrauchs. Das auffälligste ist, dass es in der rauen Umgebung von Hochspannung und Hochstrom kontinuierlich arbeiten kann.
SAW-Sensoren können grob in 4 Typen unterteilt werden: Aktiver Verzögerungsleitungstyp, aktiver Resonanztyp, passiver Verzögerungsleitungstyp und passiver Resonanztyp. Der in diesem System verwendete passive Resonanz-SAW-Sensor bietet im Vergleich zu anderen Typen die Vorteile der Passivität und der hohen Empfindlichkeit und ist besser für die drahtlose Temperaturerfassung geeignet. Der Gesamtaufbau des Systems ist in Abbildung 1 dargestellt.
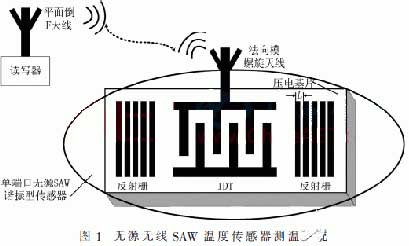
Arbeitsprinzip: Der Leser erzeugt ein Erregungssignal und die PIFA-Antenne empfängt und sendet das Erregungssignal. Die Helixantenne im Normalmodus verwendet das empfangene Signal, um den SAW-Temperatursensor anzusteuern, und ihr Interdigitalwandler wandelt das empfangene elektrische Signal in ein akustisches Signal um. Wenn sich die Temperatur auf dem piezoelektrischen Substrat des SAW-Sensors ändert, ändert sich die Ausbreitungsgeschwindigkeit der akustischen Oberflächenwelle, wodurch sich die Resonanzfrequenz des SAW-Sensors ändert. Das akustische Signal gelangt nach dem Durchgang durch das reflektierende Gitter zurück zum Interdigitalwandler. Der Interdigitalwandler wandelt es in ein elektrisches Signal um, und das Signal mit den Temperaturinformationen wird über die Normalmodus-Wendelantenne zum Lesegerät zurückgeführt. Schließlich erhält der Leser den Temperaturwert, indem er die Änderungen der beiden Signalfrequenzen vergleicht und die Beziehung zwischen Frequenz und Temperatur kombiniert.
2 PIFA-Antennendesign
2.1 Modellbau
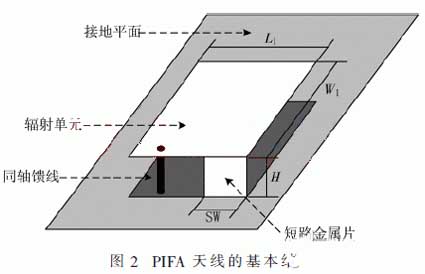
Eine typische PIFA-Antenne wird als Signalempfangs- und Strahlungseinheit des Sensors verwendet, und ihre Grundstruktur ist in Fig. 2 gezeigt. Die PIFA-Antenne enthält hauptsächlich eine Masseebene, ein Strahlungselement, ein kurzgeschlossenes Metallstück und eine koaxiale Einspeisung Linie und L1 und W1 sind jeweils die Länge und Breite des Strahlungselements. SW und H sind die Breite und Höhe des kurzgeschlossenen Metallstücks.
(1) Auslegung der Strahlungseinheit
Die Beziehung zwischen der Länge L1 des Strahlungselements der PIFA-Antenne und der Breite W1 hängt mit der zentralen Betriebswellenlänge λc zusammen:

Die Mitte der Antenne in diesem System arbeitet bei 915 MHz, so dass der Wert von λc ungefähr 327,87 mm beträgt. Gemäß der Formel (1) werden die Werte von L1 und W1 erhalten. Im ursprünglichen Modell dieses Entwurfs betrug L1 55 mm und W1 32 mm.
(2) Konstruktion eines Metallkurzschlusses
Die Breite SW des kurzgeschlossenen Metallstücks wirkt sich auf die Resonanzfrequenz und die effektive Bandbreite der Antenne aus. Bei dieser Konstruktion hat das ursprüngliche Modell SW einen Wert von 5 mm.
(3) Auslegung des Einspeisepunktes
Bei dieser Konstruktion verwendet der Vorschubmodus eine koaxiale Einspeisung. Die Koordinaten des Mittelpunkts derselben Achse sind (Xf, Yf, 0), der Innendurchmesser wird durch r1 dargestellt und der Außendurchmesser wird durch r2 dargestellt. Die Werte von Xf und Yf betragen 16 mm bzw. 5 mm und die Werte von r1 und r2 betragen 0,25 mm bzw. 0,59 mm.
(4) Auslegung der Erdungsebene
2.2 Analyse der Simulationsergebnisse
Durch Simulation wird das Wobbelergebnis der Rückflussdämpfung S11 erhalten, und die Mittenbetriebsfrequenz (Resonanzfrequenz) der PIFA-Antenne kann als 915 MHz erhalten werden. Die 10-dB-Bandbreite beträgt ungefähr 101 MHz (872,1 MHz bis 973,5 MHz) und ist größer als 80 MHz, um die Anforderungen dieses Entwurfs zu erfüllen.
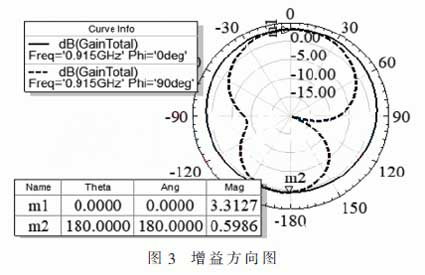
Fig. 3 ist ein Verstärkungsdiagramm der PIFA-Antenne auf den Querschnitten xz und yz. Die Strahlungsfläche wird basierend auf sphärischen Koordinaten definiert, also = 0 ° Ebene der xz-Ebene, eine durchgezogene Linie ist ein Verstärkungsmuster auf dem xz-Querschnitt; Die Ebene von = 90 ° ist die yz-Ebene, und die gestrichelte Linie in der Figur ist das Verstärkungsmuster im yz-Abschnitt. M1 ist der maximale Verstärkungspunkt direkt über dem Strahlungselement mit einer Verstärkung von 3,34 dB und einer Verstärkung von m2 von ungefähr 0,55 dB.
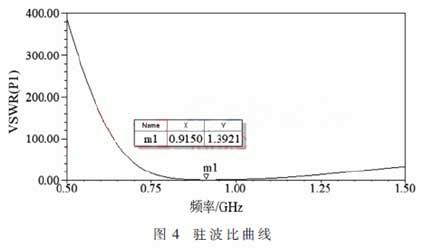
Die Stehwellenverhältniskurve der PIFA-Antenne ist in Abb. 4 dargestellt. Der m1-Punkt in der Figur zeigt an, dass, wenn die PIFA-Antenne bei einer Mittenfrequenz von 915 MHz arbeitet, das Stehwellenverhältnis etwa 1,24 und weniger als 1,5 beträgt. Dies zeigt an, dass der Arbeitszustand des PIFA zu diesem Zeitpunkt nahe an der Wanderwelle liegt und die Übertragungseigenschaften ideal sind, was dem Entwurfsziel entspricht.
2.3 Optimierungsdesign
Um die optimale Größe der Antennenstruktur zu erhalten, werden die Hauptparameter der Antenne simuliert und optimiert.
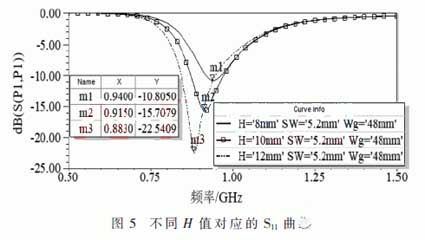
(1) Einfluss der Antennenhöhe auf Betriebsfrequenz und Bandbreite
Die Antennenhöhe wird durch die Variable H angezeigt. Sie ist aus den Punkten m1, m2 und m3 in Fig. 1 ersichtlich. 5, dass die Resonanzfrequenzen 940 MHz, 915 MHz und 883 MHz betragen, wenn die H-Werte 8 mm, 10 mm und 12 mm betragen. Gleichzeitig betragen die entsprechenden 10-dB-Bandbreiten 44 MHz, 101,4 MHz und 105,4 MHz. Es kann gefolgert werden, dass mit zunehmendem H die Betriebsfrequenz der PIFA-Antenne allmählich abnimmt und die Bandbreite allmählich größer wird. In praktischen Anwendungen ist die Höhe von H im Allgemeinen unter 6 mm, nicht höher als 12 mm, verboten. Bei dieser Konstruktion wird H zu 10 mm gewählt.
(4) Impedanzanpassung der PIFA-Antenne
Es gibt viele Methoden zur Impedanzanpassung, mit denen die Antennenstruktur oder -größe angepasst und das Anpassungsnetzwerk vergrößert werden kann. Da die Position des Einspeisepunkts der PIFA-Antenne die Eingangsimpedanz stark beeinflusst, wird die Impedanzanpassung durch Ändern der Position des Einspeisepunkts durchgeführt. Es ändert hauptsächlich den Wert von W1, um die x-Achsen-Mittelkoordinate Xf (Xf = W1 / 2) der Koaxialzuführung zu ändern. Gemäß den Simulationsergebnissen ist es notwendig, die Y-Achsen-Mittelkoordinate Yf und andere Abmessungen des Koaxial-Feeders fein abzustimmen, um das gewünschte Ziel zu erreichen. Nach dem Abgleich hat die PIFA-Antenne eine Eingangsimpedanz von (50-j 10) Ω bei einer Mittenbetriebsfrequenz von 915 MHz, was den Entwurfsanforderungen entspricht.
Herkömmliche Temperatursensoren können in rauen Umgebungen wie Hochspannung und Hochstrom keine kontinuierliche Temperaturüberwachung durchführen, während Temperatursensoren für akustische Oberflächenwellen mit Antennensystemen kombiniert werden können, um eine drahtlose passive Erkennung zu erreichen und in den oben genannten rauen Umgebungen normal zu arbeiten. Lee Keekeun und FACHBERGER R et al. entwarf einen verzögerten linearen Oberflächen-Schallwellentemperatursensor. Eine Mittenfrequenz beträgt 440 MHz und die andere 2,4 GHz, die zur Temperaturerfassung in Hochtemperaturumgebungen verwendet werden kann, aber der maximale effektive Erfassungsabstand zwischen beiden ist nicht weit. Ling Mingfang und Zhu Yunhai entwarfen die Schaltung des Temperatursensors vom Typ eines akustischen Oberflächenwellenresonators. Die Testdaten zeigen: Der Temperatursensor für akustische Oberflächenwellenresonanz hat die Vorteile einer hohen Frequenzstabilität und einer guten Linearität und eignet sich zum Testen in hochpräzisen Temperaturanwendungen. Entsprechend dem Forschungsstatus im In- und Ausland kann der Resonanzoberflächen-Schallwellentemperatursensor zusammengefasst werden, der die Vorteile einer guten Zuverlässigkeit und einer hohen Empfindlichkeit aufweist. Im Vergleich zum Verzögerungsleitungstyp ist es besser für die drahtlose Erkennung geeignet.
Planare invertierte F-Antenne, dh PIFA-Antenne.
Es hat den Vorteil, dass es vom Metallkörper nicht beeinflusst wird, leicht zu integrieren ist und eine eigene Bezugsebene hat. Als Systemsendeantenne ist sie mit dem Lesegerät verbunden und für das Senden des Anregungssignals und das Empfangen des reflektierten Signals verantwortlich. Die Normalmodus-Spirale wird aufgrund ihrer geringen Größe und der omnidirektionalen Strahlungsstrahlung als Empfangsantenne des Systems verwendet. Es ist dafür verantwortlich, das Signal von der Sendeantenne zu empfangen und an den Oberflächenwellen-Temperaturfühler zu senden. Daher ist die Sendeantenne des Systems PIFA, und die Empfangsantenne ist eine Normalmodus-Wendelantenne.
1 System Gesamtdesign
Der SAW-Temperatursensor (Surface Acoustic Wave) verwendet die Technologie der akustischen Oberflächenwellen. Im Vergleich zu herkömmlichen Sensoren bietet es die Vorteile einer hohen Präzision, einer hohen Empfindlichkeit, einer einfachen Integration und eines geringen Stromverbrauchs. Das auffälligste ist, dass es in der rauen Umgebung von Hochspannung und Hochstrom kontinuierlich arbeiten kann.
SAW-Sensoren können grob in 4 Typen unterteilt werden: Aktiver Verzögerungsleitungstyp, aktiver Resonanztyp, passiver Verzögerungsleitungstyp und passiver Resonanztyp. Der in diesem System verwendete passive Resonanz-SAW-Sensor bietet im Vergleich zu anderen Typen die Vorteile der Passivität und der hohen Empfindlichkeit und ist besser für die drahtlose Temperaturerfassung geeignet. Der Gesamtaufbau des Systems ist in Abbildung 1 dargestellt.
2 PIFA-Antennendesign
2.1 Modellbau
Eine typische PIFA-Antenne wird als Signalempfangs- und Strahlungseinheit des Sensors verwendet, und ihre Grundstruktur ist in Fig. 2 gezeigt. Die PIFA-Antenne enthält hauptsächlich eine Masseebene, ein Strahlungselement, ein kurzgeschlossenes Metallstück und eine koaxiale Einspeisung Linie und L1 und W1 sind jeweils die Länge und Breite des Strahlungselements. SW und H sind die Breite und Höhe des kurzgeschlossenen Metallstücks.
(1) Auslegung der Strahlungseinheit
Die Beziehung zwischen der Länge L1 des Strahlungselements der PIFA-Antenne und der Breite W1 hängt mit der zentralen Betriebswellenlänge λc zusammen:
Die Mitte der Antenne in diesem System arbeitet bei 915 MHz, so dass der Wert von λc ungefähr 327,87 mm beträgt. Gemäß der Formel (1) werden die Werte von L1 und W1 erhalten. Im ursprünglichen Modell dieses Entwurfs betrug L1 55 mm und W1 32 mm.
(2) Konstruktion eines Metallkurzschlusses
Die Breite SW des kurzgeschlossenen Metallstücks wirkt sich auf die Resonanzfrequenz und die effektive Bandbreite der Antenne aus. Bei dieser Konstruktion hat das ursprüngliche Modell SW einen Wert von 5 mm.
(3) Auslegung des Einspeisepunktes
Bei dieser Konstruktion verwendet der Vorschubmodus eine koaxiale Einspeisung. Die Koordinaten des Mittelpunkts derselben Achse sind (Xf, Yf, 0), der Innendurchmesser wird durch r1 dargestellt und der Außendurchmesser wird durch r2 dargestellt. Die Werte von Xf und Yf betragen 16 mm bzw. 5 mm und die Werte von r1 und r2 betragen 0,25 mm bzw. 0,59 mm.
(4) Auslegung der Erdungsebene
2.2 Analyse der Simulationsergebnisse
Durch Simulation wird das Wobbelergebnis der Rückflussdämpfung S11 erhalten, und die Mittenbetriebsfrequenz (Resonanzfrequenz) der PIFA-Antenne kann als 915 MHz erhalten werden. Die 10-dB-Bandbreite beträgt ungefähr 101 MHz (872,1 MHz bis 973,5 MHz) und ist größer als 80 MHz, um die Anforderungen dieses Entwurfs zu erfüllen.
Fig. 3 ist ein Verstärkungsdiagramm der PIFA-Antenne auf den Querschnitten xz und yz. Die Strahlungsfläche wird basierend auf sphärischen Koordinaten definiert, also = 0 ° Ebene der xz-Ebene, eine durchgezogene Linie ist ein Verstärkungsmuster auf dem xz-Querschnitt; Die Ebene von = 90 ° ist die yz-Ebene, und die gestrichelte Linie in der Figur ist das Verstärkungsmuster im yz-Abschnitt. M1 ist der maximale Verstärkungspunkt direkt über dem Strahlungselement mit einer Verstärkung von 3,34 dB und einer Verstärkung von m2 von ungefähr 0,55 dB.
Die Stehwellenverhältniskurve der PIFA-Antenne ist in Abb. 4 dargestellt. Der m1-Punkt in der Figur zeigt an, dass, wenn die PIFA-Antenne bei einer Mittenfrequenz von 915 MHz arbeitet, das Stehwellenverhältnis etwa 1,24 und weniger als 1,5 beträgt. Dies zeigt an, dass der Arbeitszustand des PIFA zu diesem Zeitpunkt nahe an der Wanderwelle liegt und die Übertragungseigenschaften ideal sind, was dem Entwurfsziel entspricht.
2.3 Optimierungsdesign
Um die optimale Größe der Antennenstruktur zu erhalten, werden die Hauptparameter der Antenne simuliert und optimiert.
(1) Einfluss der Antennenhöhe auf Betriebsfrequenz und Bandbreite
Die Antennenhöhe wird durch die Variable H angezeigt. Sie ist aus den Punkten m1, m2 und m3 in Fig. 1 ersichtlich. 5, dass die Resonanzfrequenzen 940 MHz, 915 MHz und 883 MHz betragen, wenn die H-Werte 8 mm, 10 mm und 12 mm betragen. Gleichzeitig betragen die entsprechenden 10-dB-Bandbreiten 44 MHz, 101,4 MHz und 105,4 MHz. Es kann gefolgert werden, dass mit zunehmendem H die Betriebsfrequenz der PIFA-Antenne allmählich abnimmt und die Bandbreite allmählich größer wird. In praktischen Anwendungen ist die Höhe von H im Allgemeinen unter 6 mm, nicht höher als 12 mm, verboten. Bei dieser Konstruktion wird H zu 10 mm gewählt.
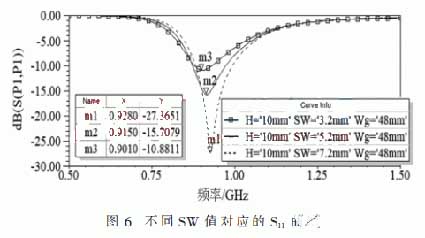
(2) Wirkung der Kurzschlußmetallstreifenbreite auf Betriebsfrequenz und Bandbreite
Die Variable SW wird verwendet, um die Breite des kurzgeschlossenen Metallstücks der PIFA-Antenne anzuzeigen. Es ist aus m1, m2 und m3 in Fig. 6 ersichtlich. Wenn die SW 7,2 mm, 5,2 mm und 3,2 mm beträgt, betragen die entsprechenden Resonanzfrequenzen 901 MHz, 915 MHz und 928 MHz. Die entsprechenden 10-dB-Bandbreiten betragen 111,8 MHz, 101,4 MHz bzw. 53,3 MHz. Je kleiner die Breite des kurzgeschlossenen Metallstücks ist, während andere Parameter konstant gehalten werden, desto niedriger ist daher die Mittenbetriebsfrequenz der PIFA-Antenne und desto schmaler ist die Bandbreite.
Die Variable SW wird verwendet, um die Breite des kurzgeschlossenen Metallstücks der PIFA-Antenne anzuzeigen. Es ist aus m1, m2 und m3 in Fig. 6 ersichtlich. Wenn die SW 7,2 mm, 5,2 mm und 3,2 mm beträgt, betragen die entsprechenden Resonanzfrequenzen 901 MHz, 915 MHz und 928 MHz. Die entsprechenden 10-dB-Bandbreiten betragen 111,8 MHz, 101,4 MHz bzw. 53,3 MHz. Je kleiner die Breite des kurzgeschlossenen Metallstücks ist, während andere Parameter konstant gehalten werden, desto niedriger ist daher die Mittenbetriebsfrequenz der PIFA-Antenne und desto schmaler ist die Bandbreite.
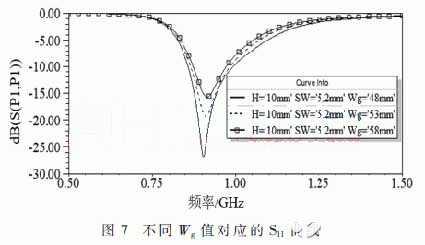
(3) Die Auswirkung der Breite der Grundebene auf die Betriebsfrequenz und Bandbreite
Die Variable Wg wird verwendet, um die Breite der PIFA-Antennengrundplatte anzugeben. Abbildung 7 zeigt die Ergebnisse der Parameter-Sweep-Analyse. Es ist ersichtlich, dass sich mit zunehmender Breite Wg der Grundebene die Resonanzfrequenz der PIFA-Antenne kaum ändert, die Bandbreite sich jedoch erheblich ändert. Das heißt, wenn die anderen Konstanten beibehalten werden, nimmt die Bandbreite der PIFA-Antenne allmählich ab, wenn sich die Wg von 48 mm auf 58 mm ändert.
Die Variable Wg wird verwendet, um die Breite der PIFA-Antennengrundplatte anzugeben. Abbildung 7 zeigt die Ergebnisse der Parameter-Sweep-Analyse. Es ist ersichtlich, dass sich mit zunehmender Breite Wg der Grundebene die Resonanzfrequenz der PIFA-Antenne kaum ändert, die Bandbreite sich jedoch erheblich ändert. Das heißt, wenn die anderen Konstanten beibehalten werden, nimmt die Bandbreite der PIFA-Antenne allmählich ab, wenn sich die Wg von 48 mm auf 58 mm ändert.
(4) Impedanzanpassung der PIFA-Antenne
Es gibt viele Methoden zur Impedanzanpassung, mit denen die Antennenstruktur oder -größe angepasst und das Anpassungsnetzwerk vergrößert werden kann. Da die Position des Einspeisepunkts der PIFA-Antenne die Eingangsimpedanz stark beeinflusst, wird die Impedanzanpassung durch Ändern der Position des Einspeisepunkts durchgeführt. Es ändert hauptsächlich den Wert von W1, um die x-Achsen-Mittelkoordinate Xf (Xf = W1 / 2) der Koaxialzuführung zu ändern. Gemäß den Simulationsergebnissen ist es notwendig, die Y-Achsen-Mittelkoordinate Yf und andere Abmessungen des Koaxial-Feeders fein abzustimmen, um das gewünschte Ziel zu erreichen. Nach dem Abgleich hat die PIFA-Antenne eine Eingangsimpedanz von (50-j 10) Ω bei einer Mittenbetriebsfrequenz von 915 MHz, was den Entwurfsanforderungen entspricht.




