Diseno de antena en el sistema de medición de temperatura del sensor de temperatura SAW
En muchos equipos de potencia, debido al proceso de instalación y al envejecimiento, etc., la resistencia de contacto de los contactos de la línea de alimentación se vuelve grande, lo que a su vez hace que la temperatura aumente y, en casos graves, los contactos se queman y se produce un fallo de alimentación. Para evitar este peligro de seguridad, es necesario diseñar y desarrollar un dispositivo de monitoreo de temperatura.
Los sensores de temperatura convencionales no pueden realizar un monitoreo continuo de la temperatura en ambientes hostiles como alto voltaje y alta corriente, mientras que los sensores de temperatura de onda acústica de superficie se pueden combinar con sistemas de antena para lograr la detección pasiva inalámbrica y operar normalmente en los ambientes hostiles mencionados anteriormente. Lee Keekeun y FACHBERGER R et al. diseñó un sensor de temperatura de onda acústica de superficie lineal retardada. Una frecuencia central es de 440 MHz y la otra es de 2,4 GHz, que se puede utilizar para la detección de temperatura en entornos de alta temperatura, pero la distancia de detección efectiva máxima entre los dos no está lejos. Ling Mingfang y Zhu Yunhai diseñaron el circuito del sensor de temperatura del resonador de onda acústica de superficie. Los datos de prueba muestran: El sensor de temperatura de resonancia de onda acústica de superficie tiene las ventajas de estabilidad de alta frecuencia y buena linealidad, y es adecuado para pruebas en aplicaciones de temperatura de alta precisión. De acuerdo con el estado de la investigación en el país y en el extranjero, se puede resumir el sensor de temperatura de onda acústica de superficie resonante, que tiene las ventajas de una buena confiabilidad y alta sensibilidad. En comparación con el tipo de línea de retardo, es más adecuado para la detección inalámbrica.
Antena F invertida plana, es decir, antena PIFA.
Tiene las ventajas de no verse afectado por el cuerpo metálico, fácil de integrar y tiene su propio plano de referencia. Como antena de transmisión del sistema, está conectada con el lector y es responsable de transmitir la señal de excitación y recibir la señal reflejada. La espiral en modo normal se utiliza como antena receptora del sistema debido a su pequeño tamaño y radiación omnidireccional de radiación. Es responsable de recibir la señal de la antena transmisora y transmitirla al transmisor de temperatura de onda acústica de superficie. Por lo tanto, la antena transmisora del sistema es PIFA, y la antena receptora es una antena helicoidal en modo normal.
1 diseño general del sistema
El sensor de temperatura SAW (Surface Acoustic Wave) utiliza tecnología de onda acústica de superficie. En comparación con los sensores tradicionales, tiene las ventajas de alta precisión, alta sensibilidad, fácil integración y bajo consumo de energía. Lo más destacado es que puede funcionar continuamente en el entorno hostil de alto voltaje y alta corriente.
Los sensores SAW se pueden dividir aproximadamente en 4 tipos: tipo de línea de retardo activo, tipo de resonancia activa, tipo de línea de retardo pasivo y tipo de resonancia pasiva. El sensor SAW resonante pasivo utilizado en este sistema tiene las ventajas de pasividad y alta sensibilidad en comparación con otros tipos, y es más adecuado para la detección inalámbrica de temperatura. El diseño general del sistema se muestra en la Figura 1.
Diagrama de trabajo de medición de temperatura del sensor de temperatura SAW inalámbrico pasivo
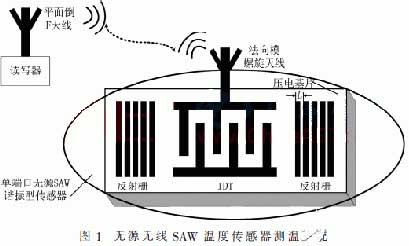
principio de funcionamiento: El lector genera una señal de excitación, y la antena PIFA recibe y transmite la señal de excitación. La antena helicoidal en modo normal utiliza la señal recibida para controlar el sensor de temperatura SAW, y su transductor interdigital convierte la señal eléctrica recibida en una señal acústica. Cuando la temperatura en el sustrato piezoeléctrico del sensor SAW cambia, la velocidad de propagación de la onda acústica de la superficie cambia, cambiando así la frecuencia de resonancia del sensor SAW. La señal acústica vuelve al transductor interdigital después de pasar a través de la rejilla reflectante. El transductor interdigital lo convierte en una señal eléctrica, y la señal con información de temperatura se retroalimenta al lector a través de la antena helicoidal en modo normal. Finalmente, el lector obtiene el valor de temperatura comparando los cambios de las dos frecuencias de señal y combinando la relación entre frecuencia y temperatura.
2 diseño de antena PIFA
2.1 Diseño del modelo
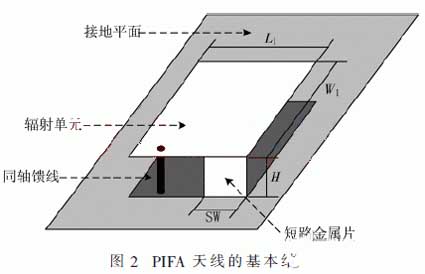
Se utiliza una antena PIFA típica como unidad receptora y radiadora de señal del sensor, y su estructura básica se muestra en la figura 2. La antena PIFA incluye principalmente un plano de tierra, un elemento radiante, una pieza de metal en cortocircuito y una alimentación coaxial línea, y L1 y W1 son, respectivamente, la longitud y el ancho del elemento radiante. SW y H son el ancho y la altura de la pieza de metal en corto, respectivamente.
(1) Diseño de la unidad de radiación.
La relación entre la longitud L1 del elemento radiante de la antena PIFA y el ancho W1 está relacionada con la longitud de onda de operación central λc:

El centro de la antena en este sistema funciona a 915 MHz, por lo que el valor de λc es de aproximadamente 327.87 mm. De acuerdo con la fórmula (1), se obtienen los valores de L1 y W1. En el modelo original de este diseño, L1 tenía 55 mm y W1 tenía 32 mm.
(2) Diseño de pieza metálica de corto circuito
El ancho SW de la pieza de metal en corto tiene un efecto sobre la frecuencia de resonancia y el ancho de banda efectivo de la antena. En este diseño, el modelo inicial SW tiene un valor de 5 mm.
(3) Diseño del punto de alimentación
En este diseño, el modo de alimentación utiliza alimentación coaxial. Las coordenadas del centro del mismo eje son (Xf, Yf, 0), el diámetro interno está representado por r1 y el diámetro externo está representado por r2. Los valores de Xf e Yf son 16 mm y 5 mm, respectivamente, y los valores de r1 y r2 son 0.25 mm y 0.59 mm, respectivamente.
(4) Diseño del plano de puesta a tierra
2.2 Análisis de los resultados de la simulación.
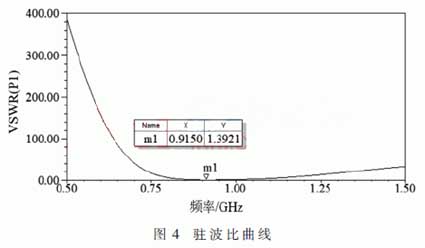
La curva de relación de onda estacionaria de la antena PIFA se muestra en la Fig. 4. El punto m1 en la figura indica que cuando la antena PIFA funciona a una frecuencia central de 915 MHz, la relación de onda estacionaria es de aproximadamente 1.24 y menos de 1.5. indicando que el estado de funcionamiento del PIFA está cerca de la onda de desplazamiento en este momento, y que las características de transmisión son ideales, lo cual está de acuerdo con el objetivo de diseño.
2.3 Diseño de optimización
Para obtener el tamaño óptimo de la estructura de la antena, los parámetros principales de la antena se simulan y optimizan.
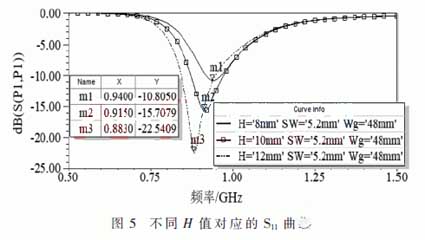
(1) Efecto de la altura de la antena sobre la frecuencia de funcionamiento y el ancho de banda
La altura de la antena se indica mediante la variable H. Se puede ver desde los puntos m1, m2 y m3 en la Fig. 5 que las frecuencias de resonancia son 940 MHz, 915 MHz y 883 MHz cuando los valores H son 8 mm, 10 mm y 12 mm. Al mismo tiempo, los anchos de banda de 10 dB correspondientes son 44 MHz, 101.4 MHz y 105.4 MHz. Se puede concluir que a medida que aumenta la H, la frecuencia de funcionamiento de la antena PIFA disminuye gradualmente y el ancho de banda aumenta gradualmente. En aplicaciones prácticas, la altura de H generalmente está prohibida por debajo de 6 mm, no más de 12 mm. En este diseño, H se elige para ser de 10 mm.
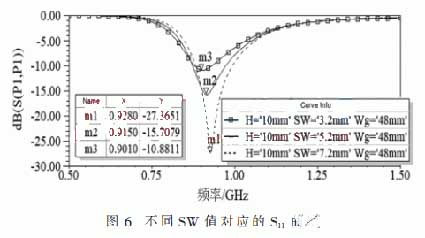
(2) Efecto del ancho de la tira de metal de cortocircuito en la frecuencia de funcionamiento y el ancho de banda
La variable SW se usa para indicar el ancho de la pieza metálica en cortocircuito de la antena PIFA. Se puede ver a partir de m1, m2 y m3 en la Fig. 6. Cuando el SW es de 7.2 mm, 5.2 mm y 3.2 mm, las frecuencias resonantes correspondientes son 901 MHz, 915 MHz y 928 MHz. Los anchos de banda de 10 dB correspondientes son 111.8 MHz, 101.4 MHz y 53.3 MHz, respectivamente. Por lo tanto, cuanto menor sea el ancho de la pieza de metal en cortocircuito mientras se mantienen constantes otros parámetros, menor será la frecuencia de funcionamiento central de la antena PIFA y menor será el ancho de banda.
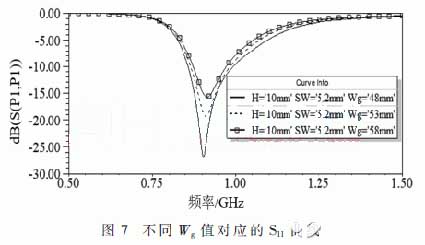
(3) El efecto del ancho del plano de tierra en la frecuencia de operación y el ancho de banda
La variable Wg se usa para indicar el ancho del plano de tierra de la antena PIFA. La Figura 7 muestra los resultados del análisis de barrido de parámetros. Se puede ver que a medida que aumenta el ancho Wg del plano de tierra, la frecuencia de resonancia de la antena PIFA apenas cambia, pero el ancho de banda cambia significativamente. Es decir, cuando se mantienen las otras constantes, el ancho de banda de la antena PIFA disminuye gradualmente a medida que el Wg cambia de 48 mm a 58 mm.
(4) Adaptación de impedancia de antena PIFA
Los sensores de temperatura convencionales no pueden realizar un monitoreo continuo de la temperatura en ambientes hostiles como alto voltaje y alta corriente, mientras que los sensores de temperatura de onda acústica de superficie se pueden combinar con sistemas de antena para lograr la detección pasiva inalámbrica y operar normalmente en los ambientes hostiles mencionados anteriormente. Lee Keekeun y FACHBERGER R et al. diseñó un sensor de temperatura de onda acústica de superficie lineal retardada. Una frecuencia central es de 440 MHz y la otra es de 2,4 GHz, que se puede utilizar para la detección de temperatura en entornos de alta temperatura, pero la distancia de detección efectiva máxima entre los dos no está lejos. Ling Mingfang y Zhu Yunhai diseñaron el circuito del sensor de temperatura del resonador de onda acústica de superficie. Los datos de prueba muestran: El sensor de temperatura de resonancia de onda acústica de superficie tiene las ventajas de estabilidad de alta frecuencia y buena linealidad, y es adecuado para pruebas en aplicaciones de temperatura de alta precisión. De acuerdo con el estado de la investigación en el país y en el extranjero, se puede resumir el sensor de temperatura de onda acústica de superficie resonante, que tiene las ventajas de una buena confiabilidad y alta sensibilidad. En comparación con el tipo de línea de retardo, es más adecuado para la detección inalámbrica.
Antena F invertida plana, es decir, antena PIFA.
Tiene las ventajas de no verse afectado por el cuerpo metálico, fácil de integrar y tiene su propio plano de referencia. Como antena de transmisión del sistema, está conectada con el lector y es responsable de transmitir la señal de excitación y recibir la señal reflejada. La espiral en modo normal se utiliza como antena receptora del sistema debido a su pequeño tamaño y radiación omnidireccional de radiación. Es responsable de recibir la señal de la antena transmisora y transmitirla al transmisor de temperatura de onda acústica de superficie. Por lo tanto, la antena transmisora del sistema es PIFA, y la antena receptora es una antena helicoidal en modo normal.
1 diseño general del sistema
El sensor de temperatura SAW (Surface Acoustic Wave) utiliza tecnología de onda acústica de superficie. En comparación con los sensores tradicionales, tiene las ventajas de alta precisión, alta sensibilidad, fácil integración y bajo consumo de energía. Lo más destacado es que puede funcionar continuamente en el entorno hostil de alto voltaje y alta corriente.
Los sensores SAW se pueden dividir aproximadamente en 4 tipos: tipo de línea de retardo activo, tipo de resonancia activa, tipo de línea de retardo pasivo y tipo de resonancia pasiva. El sensor SAW resonante pasivo utilizado en este sistema tiene las ventajas de pasividad y alta sensibilidad en comparación con otros tipos, y es más adecuado para la detección inalámbrica de temperatura. El diseño general del sistema se muestra en la Figura 1.
Diagrama de trabajo de medición de temperatura del sensor de temperatura SAW inalámbrico pasivo
principio de funcionamiento: El lector genera una señal de excitación, y la antena PIFA recibe y transmite la señal de excitación. La antena helicoidal en modo normal utiliza la señal recibida para controlar el sensor de temperatura SAW, y su transductor interdigital convierte la señal eléctrica recibida en una señal acústica. Cuando la temperatura en el sustrato piezoeléctrico del sensor SAW cambia, la velocidad de propagación de la onda acústica de la superficie cambia, cambiando así la frecuencia de resonancia del sensor SAW. La señal acústica vuelve al transductor interdigital después de pasar a través de la rejilla reflectante. El transductor interdigital lo convierte en una señal eléctrica, y la señal con información de temperatura se retroalimenta al lector a través de la antena helicoidal en modo normal. Finalmente, el lector obtiene el valor de temperatura comparando los cambios de las dos frecuencias de señal y combinando la relación entre frecuencia y temperatura.
2 diseño de antena PIFA
2.1 Diseño del modelo
Se utiliza una antena PIFA típica como unidad receptora y radiadora de señal del sensor, y su estructura básica se muestra en la figura 2. La antena PIFA incluye principalmente un plano de tierra, un elemento radiante, una pieza de metal en cortocircuito y una alimentación coaxial línea, y L1 y W1 son, respectivamente, la longitud y el ancho del elemento radiante. SW y H son el ancho y la altura de la pieza de metal en corto, respectivamente.
(1) Diseño de la unidad de radiación.
La relación entre la longitud L1 del elemento radiante de la antena PIFA y el ancho W1 está relacionada con la longitud de onda de operación central λc:
El centro de la antena en este sistema funciona a 915 MHz, por lo que el valor de λc es de aproximadamente 327.87 mm. De acuerdo con la fórmula (1), se obtienen los valores de L1 y W1. En el modelo original de este diseño, L1 tenía 55 mm y W1 tenía 32 mm.
(2) Diseño de pieza metálica de corto circuito
El ancho SW de la pieza de metal en corto tiene un efecto sobre la frecuencia de resonancia y el ancho de banda efectivo de la antena. En este diseño, el modelo inicial SW tiene un valor de 5 mm.
(3) Diseño del punto de alimentación
En este diseño, el modo de alimentación utiliza alimentación coaxial. Las coordenadas del centro del mismo eje son (Xf, Yf, 0), el diámetro interno está representado por r1 y el diámetro externo está representado por r2. Los valores de Xf e Yf son 16 mm y 5 mm, respectivamente, y los valores de r1 y r2 son 0.25 mm y 0.59 mm, respectivamente.
(4) Diseño del plano de puesta a tierra
2.2 Análisis de los resultados de la simulación.
Mediante la simulación, se obtiene el resultado del barrido de la pérdida de retorno S11, y la frecuencia de operación central (frecuencia de resonancia) de la antena PIFA se puede obtener como 915 MHz. El ancho de banda de 10 dB es de aproximadamente 101 MHz (872.1 MHz a 973.5 MHz) y es mayor de 80 MHz para cumplir con los requisitos de este diseño.
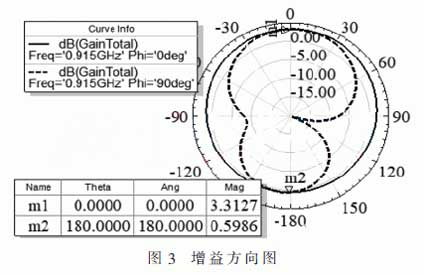
La Figura 3 es un diagrama de ganancia de la antena PIFA en las secciones transversales xz e yz. La superficie radiante se define en base a coordenadas esféricas, entonces = 0 ° plano del plano xz, una línea continua es un patrón de ganancia en la sección transversal xz; El plano de = 90 ° es el plano yz, y la línea discontinua en la figura es el patrón de ganancia en la sección yz. M1 es el punto de ganancia máxima, directamente sobre el elemento radiante, con una ganancia de 3,34 dB y una ganancia de m2 de aproximadamente 0,55 dB.
La Figura 3 es un diagrama de ganancia de la antena PIFA en las secciones transversales xz e yz. La superficie radiante se define en base a coordenadas esféricas, entonces = 0 ° plano del plano xz, una línea continua es un patrón de ganancia en la sección transversal xz; El plano de = 90 ° es el plano yz, y la línea discontinua en la figura es el patrón de ganancia en la sección yz. M1 es el punto de ganancia máxima, directamente sobre el elemento radiante, con una ganancia de 3,34 dB y una ganancia de m2 de aproximadamente 0,55 dB.
La curva de relación de onda estacionaria de la antena PIFA se muestra en la Fig. 4. El punto m1 en la figura indica que cuando la antena PIFA funciona a una frecuencia central de 915 MHz, la relación de onda estacionaria es de aproximadamente 1.24 y menos de 1.5. indicando que el estado de funcionamiento del PIFA está cerca de la onda de desplazamiento en este momento, y que las características de transmisión son ideales, lo cual está de acuerdo con el objetivo de diseño.
2.3 Diseño de optimización
Para obtener el tamaño óptimo de la estructura de la antena, los parámetros principales de la antena se simulan y optimizan.
(1) Efecto de la altura de la antena sobre la frecuencia de funcionamiento y el ancho de banda
(2) Efecto del ancho de la tira de metal de cortocircuito en la frecuencia de funcionamiento y el ancho de banda
La variable SW se usa para indicar el ancho de la pieza metálica en cortocircuito de la antena PIFA. Se puede ver a partir de m1, m2 y m3 en la Fig. 6. Cuando el SW es de 7.2 mm, 5.2 mm y 3.2 mm, las frecuencias resonantes correspondientes son 901 MHz, 915 MHz y 928 MHz. Los anchos de banda de 10 dB correspondientes son 111.8 MHz, 101.4 MHz y 53.3 MHz, respectivamente. Por lo tanto, cuanto menor sea el ancho de la pieza de metal en cortocircuito mientras se mantienen constantes otros parámetros, menor será la frecuencia de funcionamiento central de la antena PIFA y menor será el ancho de banda.
(3) El efecto del ancho del plano de tierra en la frecuencia de operación y el ancho de banda
La variable Wg se usa para indicar el ancho del plano de tierra de la antena PIFA. La Figura 7 muestra los resultados del análisis de barrido de parámetros. Se puede ver que a medida que aumenta el ancho Wg del plano de tierra, la frecuencia de resonancia de la antena PIFA apenas cambia, pero el ancho de banda cambia significativamente. Es decir, cuando se mantienen las otras constantes, el ancho de banda de la antena PIFA disminuye gradualmente a medida que el Wg cambia de 48 mm a 58 mm.
(4) Adaptación de impedancia de antena PIFA
Existen muchos métodos para la adaptación de impedancias, que pueden ajustar la estructura o el tamaño de la antena, y también pueden aumentar la red de adaptación. Dado que la posición del punto de alimentación de la antena PIFA afecta en gran medida la impedancia de entrada, la adaptación de la impedancia se realiza cambiando la posición del punto de alimentación. Principalmente cambia el valor de W1 para cambiar la coordenada central del eje x Xf (Xf = W1 / 2) del alimentador coaxial. De acuerdo con los resultados de la simulación, es necesario afinar la coordenada central del eje y Yf y otras dimensiones del alimentador coaxial para lograr el objetivo deseado. Después de la coincidencia, la antena PIFA tiene una impedancia de entrada de (50-j 10) Ω a una frecuencia de operación central de 915 MHz, que cumple con los requisitos de diseño.




